|
IT- Departamento de Engenharia SEROPÉDICA-RIO DE JANEIRO MAIO-2008 IT 154- Motores e Tratores |
|
IT- Departamento de Engenharia SEROPÉDICA-RIO DE JANEIRO MAIO-2008 IT 154- Motores e Tratores |
|
Estabilidade de Tratores Agrícolas de Pneus Carlos Alberto Alves Varella - varella@ufrrj.br Joseph Kalil Khoury Junior - kalil@ufrrj.br |
||||||||||||
|
INTRODUÇÃO |
||||||||||||
|
A estimativa mundial da frota de tratores agrícolas de
pneus é de 27,6 milhões de unidades, correspondendo à frota brasileira
336.589 unidades (ANFAVEA, 2008). A crescente utilização do trator
agrícola tem trazido como conseqüência o aumento de acidentes de trabalho,
mesmo com as diversas melhorias realizadas no seu projeto, para aumentar a
eficiência, conforto e segurança nas operações. A maioria dos acidentes
envolvendo tratores é fatal. Estima-se que de 85% desses acidentes, 70%
são devidos ao tombamento lateral e 15% ao tombamento longitudinal para trás (FUNDACENTRO,
1979). Conforme apresentado por DELGADO (1991), 60% dos acidentes com
tratores agrícolas são causados por tombamentos. Estudos desenvolvidos nos
últimos anos indicaram que entre 40 a 66% dos acidentes fatais tem sido
devido a tombamento (SANDERSON et al., 2006). DEBIASI et al. (2004),
estudando as causas dos acidentes de trabalho envolvendo conjuntos
tratorizados, concluíram que os acidentes foram causados por atitudes e
condições inseguras, representando 82 e 18%, respectivamente.
Destacando-se entre as principais causas a operação do trator em condições
para as quais não foi projetado e a perda de controle em aclives/declives.
A estabilidade do trator é um parâmetro que devido a sua significativa
influência no tombamento do trator tem sido há muitos anos, motivo de
estudo de diferentes autores. Por meio de simulações tem sido estudado o
comportamento dos tratores em acidentes com tombamento lateral, além da
estabilidade lateral quando o trator se movimentando em curva e sob alta
velocidade. Estudos concluíram que os efeitos dos parâmetros que
caracterizam a relação pneu-solo têm grande influência no estudo da
estabilidade de tratores, e que o conhecimento das forças laterais que
atuam nos pneus, assim como as forças laterais e de tração que atuam no
sistema em estudo, é de grande importância para realizar uma simulação
correta da dinâmica do trator (REHKUGLER et al., 1976; REHKUGLER, 1982;
KIM & REHKUGLER, 1987). Estudos mais recentes simularam o comportamento da
estabilidade de um trator, tracionando uma carreta durante a subida e
descida de uma ladeira. Foi definido o limite da carga e o ângulo de
inclinação em que pode trabalhar o conjunto para não tornar-se instável (ABU-HAMDEH
& AL-JALIL, 2004). KHOURY JUNIOR et al. (2004), desenvolveram um modelo
matemático capaz de prever a perda da estabilidade de tratores 4x2, sem
implemento acoplado, com satisfatória precisão. Os autores concluíram que
a energia adquirida pelo chassi do trator no início do estágio de
tombamento é capaz de dar continuidade a este, quando o chassi colide com
o eixo frontal. Os estudos da dinâmica de tratores agrícolas utilizando
modelos matemáticos têm sido muito úteis para o desenvolvimento de
projetos de tratores otimizados e mais seguros. |
||||||||||||
EQUILÍBRIO ESTÁTICO LATERAL DO TRATOR |
||||||||||||
|
Segundo MIALHE (1980), a análise do equilíbrio estático lateral de tratores agrícolas é importante para o estabelecimento de declividades limites dos terrenos para uso de máquinas agrícolas. |
||||||||||||
|
|
||||||||||||
Declividade do terreno |
||||||||||||
|
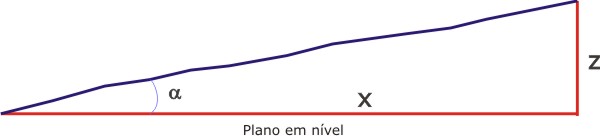
Na Figura 1 a superfície do terreno é representada pela hipotenusa do triângulo retângulo. A declividade do terreno é normalmente expressa em porcentagem e é calculada pela Equação 1. |
||||||||||||
|
|
||||||||||||
|
em que, dt = declividade do terreno; x = distância horizontal; z = distância vertical.
Figura 1. A superfície do terreno é representada pela hipotenusa do triângulo retângulo.
|
||||||||||||
Condições de equilíbrio estático lateral |
||||||||||||
|
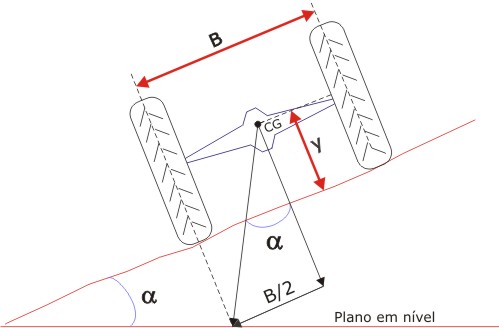
A Figura 2 ilustra a vista de trás de um trator apoiado sobre um plano de apoio inclinado de ângulo α. Neste modelo, considera-se que o centro de gravidade do trator (CG) está localizado no plano médio do trator. Segundo MIALHE (1980) a declividade máxima do plano de apoio para equilíbrio estático lateral de tratores pode ser calculada pela Equação 2.
B = bitola do trator; y = cota vertical do centro de gravidade do trator. |
||||||||||||
|
Figura 2. Vista de trás de um trator apoiado sobre um plano inclinado de ângulo α. |
||||||||||||
|
|
||||||||||||
|
|
||||||||||||
Declividade limite operacional |
||||||||||||
|
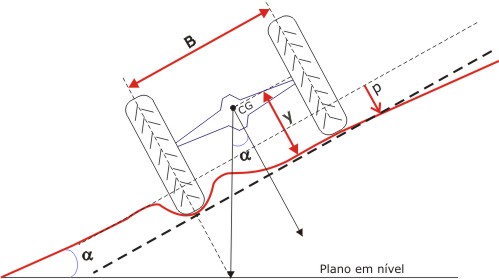
Consideremos a situação de um trator fazendo aração de um terreno inclinado caminhando com a roda no interior do sulco, como mostra esquematicamente a Fig. 2.6. Como se observa, existem dois planos a considerar : a) plano da superfície do terreno e b) plano de apoio do trator, cada um com sua declividade própria. Como norma de segurança recomenda-se que o valor de dO seja multiplicado por um coeficiente de segurança igual a 0,5 (Equação 4). |
||||||||||||
|
B = bitola do trator; y = cota vertical do centro de gravidade do trator; p = profundidade do sulco; 0,5 = coeficiente de segurança. |
||||||||||||
|
Figura 3. Considerando a roda direita do trator posicionada dentro de um sulco de profundidade 'p'.
|
||||||||||||
EQUILÍBRIO ESTÁTICO LONGITUDINAL DO TRATOR |
||||||||||||
|
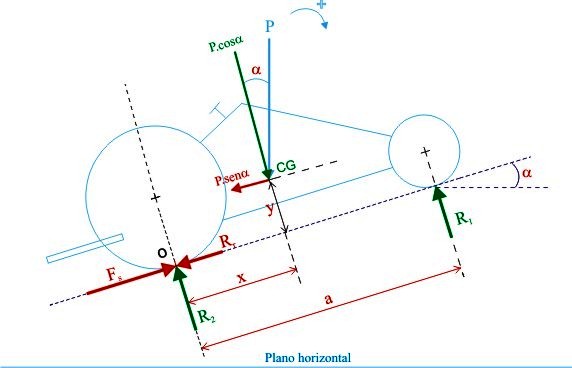
A Figura 4 ilustra um trator sem carga apoiado sobre uma rampa de ângulo a. Nestas condições as forças consideradas na análise são: resistência do solo à tração (Fs), resistência do solo ao rolamento (Rr), peso do trator (P) e reações no eixo dianteiro (R1) e traseiro (R2). Estando o trator em equilíbrio o somatório das forças que atuam no plano paralelo ao deslocamento do trator ( SFx=0) deve ser igual a zero: |
||||||||||||
|
|
||||||||||||
|
|
||||||||||||
|
o somatório das forças no plano vertical ao deslocamento do trator é: |
||||||||||||
|
|
||||||||||||
|
|
||||||||||||
|
P= peso do trator; R2 = reação no eixo traseiro. |
||||||||||||
|
||||||||||||
| Figura 4. Condições da estabilidade longitudinal sem carga. | ||||||||||||
|
|
||||||||||||
|
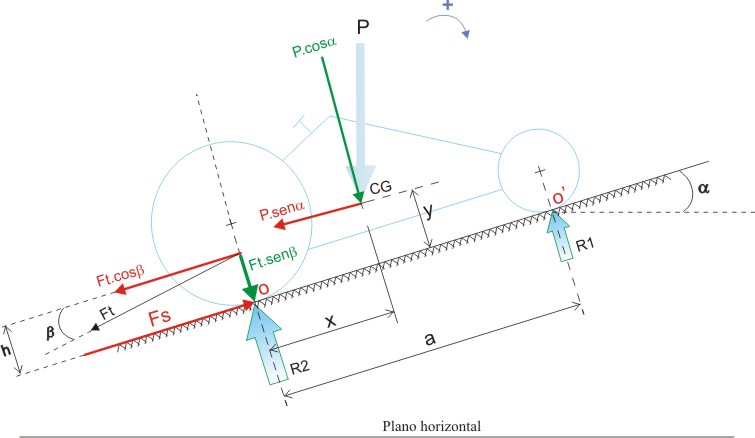
A Figura 4 ilustra um trator em uma rampa com ângulo de inclinação (α). A força de tração apresenta ângulo b em relação ao plano de deslocamento do trator. As forças que apresentam efeito na estabilidade longitudinal do trator são: as componentes horizontais do peso e da força de tração (P.sena e Ft.conb) e a força de resistência do solo à tração. do trator (Fs). A Equação 1 e 2 definem o equilíbrio das forças na direção paralela e perpendicular ao plano de deslocamento do trator.
|
||||||||||||
|
|
||||||||||||
| Figura 4. Trator em uma rampa com ângulo de inclinação α e força de tração Ft. | ||||||||||||
|
Considerando-se o ponto O como centro de rotação das forças que atuam no trator, podemos estimar a quantidade de peso sobre o eixo dianteiro e traseiro. As Equações 3 e 4 definem a quantidade de peso sobre os eixos dianteiros e traseiros. |
||||||||||||
|
|
||||||||||||
|
|
||||||||||||
|
Ft= força de tração; b= ângulo da força de tração em relação ao plano de deslocamento do trator; P= peso do trator; a= ângulo de inclinação da rampa; Fs= força de resistência do solo à tração. |
||||||||||||
|
|
||||||||||||
| R1= peso sobre o eixo dianteiro; R2= peso sobre o eixo traseiro. | ||||||||||||
CENTRO DE GRAVIDADE |
||||||||||||
|
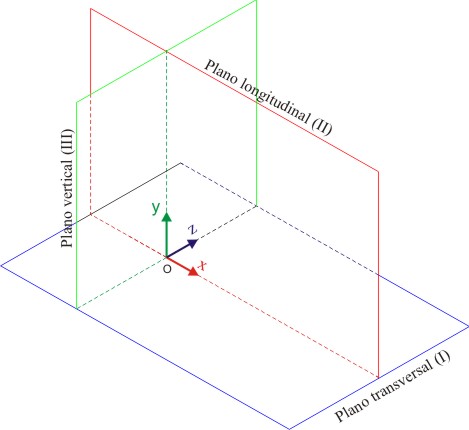
A Figura 5 ilustra o triedro de referência para localização do centro de gravidade de tratores agrícolas. A origem 'o' está localizada na base da interseção entre os planos transversal, longitudinal e vertical. O trator está apoiado sobre o plano transversal (I). O plano longitudinal (II) passa pela linha central do trator e o plano vertical passa pela linha central do eixo traseiro. O centro de gravidade possui três dimensões: cota longitudinal, cota vertical e cota transversal (x,y,z). Todas as cotas são expressas em milímetros e representam as distâncias do centro de gravidade do trator aos respectivos planos do triedro de referência. |
||||||||||||
|
|
||||||||||||
| Figura 5. Triedro de referência para localização do centro de gravidade de tratores agrícolas. | ||||||||||||
|
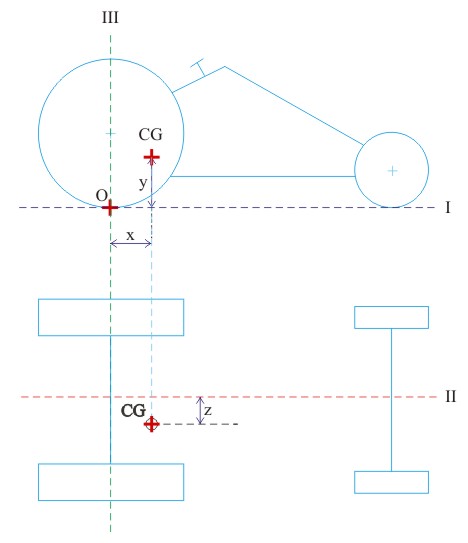
O centro de gravidade em tratores de rodas nem sempre está localizado na linha central do trator, isto é, podendo estar deslocado para a direita (cota transversal negativa) ou para a esquerda (cota vertical positiva). A Figura 6 ilustra a localização do centro de gravidade de um trator agrícola que apresenta cota transversal negativa, isto é, o centro de gravidade do trator está deslocado para a direita. Nesta figura as cotas longitudinal (x) e vertical (y) são positivas e a cota transversal (z) é negativa. |
||||||||||||
|
|
||||||||||||
| Figura 6. Localização do centro de gravidade de tratores agrícolas. | ||||||||||||
|
O centro de gravidade varia de posição quando adicionamos lastros ao trator. No Quadro 1 são apresentados cotas do CG de um trator agrícola com lastro e sem lastro. Observa-se que com adição de lastros houve variação de todas as cotas do CG. A cota transversal (z) que apresentava valor zero sem lastro mudou para -4 mm com lastro. |
||||||||||||
| Quadro 1. Cotas do centro de gravidade de um trator com lastro e sem lastro | ||||||||||||
|
||||||||||||
| Fonte: Boletim técnico CENEA, ano IV, n.10, 1985. | ||||||||||||
|
CONCLUSÕES |
||||||||||||
|
A bitola e a localização do centro de gravidade na coordenada vertical são os fatores que mais afetam a estabilidade para tombamento lateral de tratores agrícolas. A localização do centro de gravidade na coordenada longitudinal e a distância entre eixos afetam a estabilidade de tratores agrícolas em tombamentos para trás. O trator desliza os rodados do lado do tombamento ou perde a dirigibilidade dos pneus frontais antes de ocorrer o tombamento lateral.
|
||||||||||||
|
Referências Bibliográficas |
||||||||||||
|
ABU-HAMDEH, N.H.; AL-JALIL, H.F. Computer simulation of stability and control of tractortrailed implement combinations under different operating conditions. Bragantia. Campinas, v.63, n.1, p.149-162, 2004. ANFAVEA - ASSOCIAÇÃO NACIONAL DOS FABRICANTES DE VEÍCULOS AUTOMOTORES. Anuário Estatístico da Indústria Automobilística Brasileira. 2007. Disponível em: http://www.anfavea.com.br/anuario2007/Cap1_15_2007.pdf. Acesso em 08 mai. 2008. DEBIASI, H.; SCHLOSSER, J.F.; WILLES, J.A. Acidentes de trabalho envolvendo conjuntos tratorizados em propriedades rurais do Rio Grande do Sul, Brasil. Ciência Rural, Santa Maria. v.34, n.3, p.779-784, 2004. DELGADO, L.M. El tractor agrícola características y utilización. Madrid: Ministério de Agricultura, Pesca y Alimentación, 1991. 235p. FUNDACENTRO - FUNDAÇÃO JORGE DUPRAT FIGUEIREDO DE SEGURANÇA E MEDICINA . Manual de segurança, higiene e medicina do trabalhador rural. São Paulo: 1979. 84p. KHOURY JUNIOR, J.K., DIAS, G.P., CORDEIRO, R.R., SOUZA, C.M.A. Modelagem da estabilidade de tratores agrícolas de pneus. Pesquisa Agropecuária Brasileira, Brasília, v.39, n.5, p.459-468, 2004. KIM, K.U., REHKUGLER, G. E. A rewiew of tractor dynamics and stability. Transactions of the ASAE, v.30, n.3, p.615-623, 1987. REHKUGLER, G.E. Tractor steering dynamics – simulated and measured. Transactions of the ASAE, v.25, n.2, p.1515-1519, 1982. REHKUGLER, G.E., KUMAR, V., DAVIS, D.C. simulation of tractor accidents and overturns. Transactions of the ASAE, v30, n.3, p.601-604, 1976. SANDERSON, W.T.; MADSEN, M.D.; RAUTIAINEN, R.; KELLY, K.M.; ZWERLING, C.; TAYLOR, C.D.; REYNOLDS, S.J.; STROMQUIST, A.M.; BURMEISTER, L.F.; MERCHANT, J.A. Tractor overturn concerns in Iowa: perspectives from the Keokuk county rural health study. Journal of Agricultural Safety and Health, v.12, n.1, p.71-81, 2006. MIALHE, L. G. Máquinas motoras na agricultura, v.2, 365p. Editora da USP, São Paulo. 1980. |
||||||||||||
|
Harshman, W.C. ; Yoder, A.M. ; Hilton, V.; Murphy, D.J. Tractors stability. The Pennsylvania State University, 2004. Disponível em: http://abe.sdstate.edu/hosta/index_files/Task%20Sheets/4.12%20Tractor%20Stability.pdf. Acesso em 26 jun. 2008. |
||||||||||||